
Factory Automation And Controls
Motion Controller - Tech Support - Knowledge Base
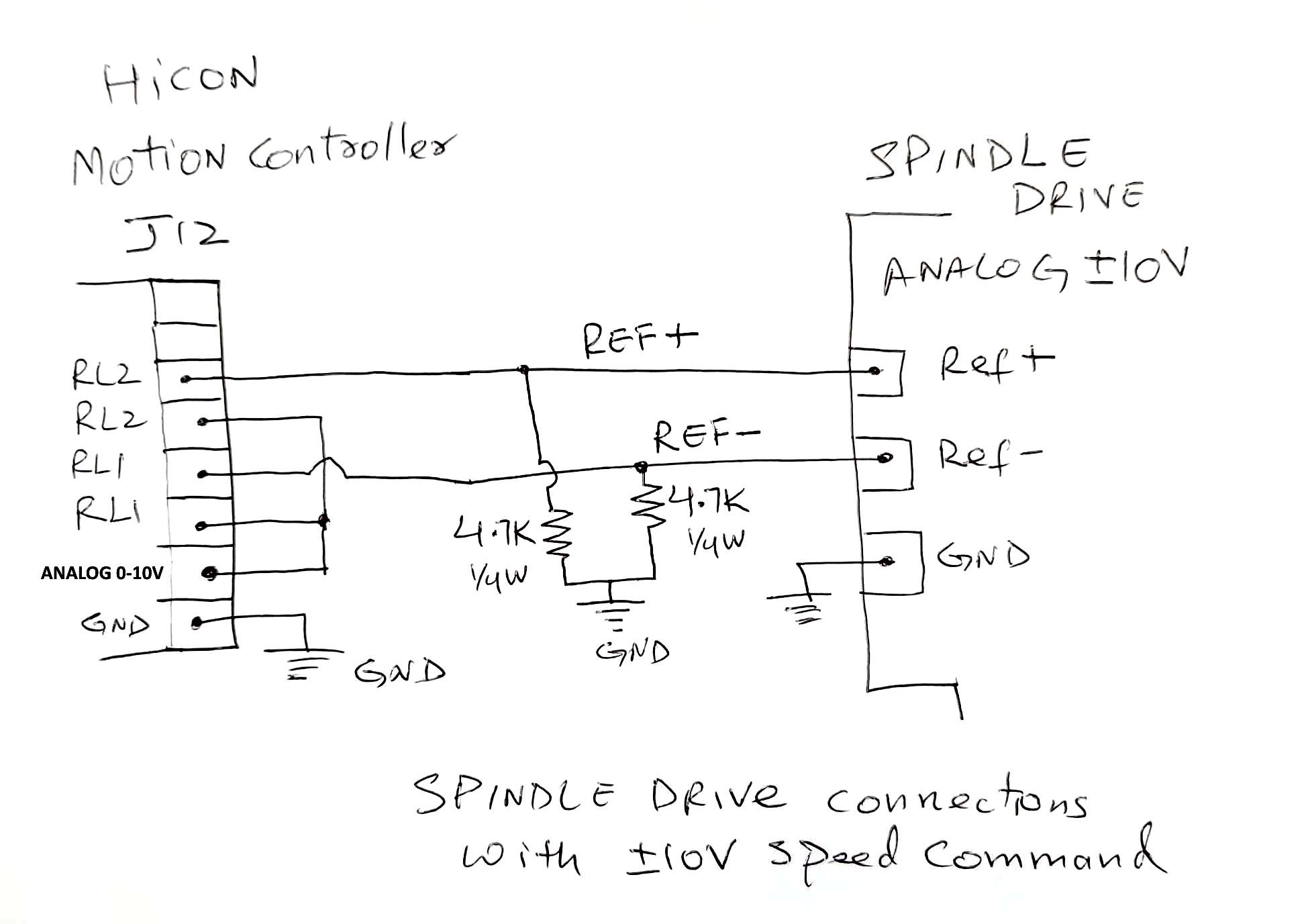
HiCON Integra with ±10V Analog Spindle Drive
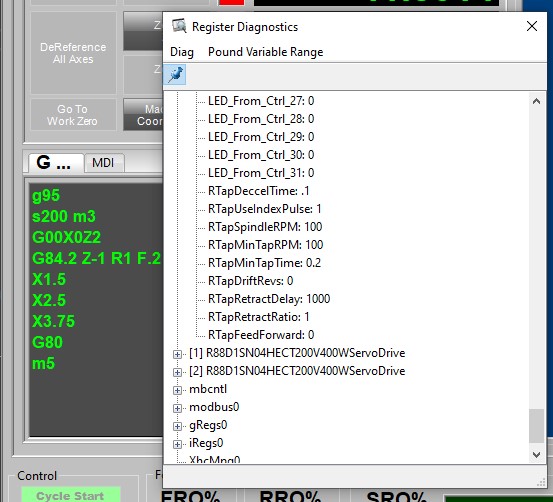
For more information on Rigid Tapping, please refer to the following guide:
Start with Mach4 profile available on our website. Modify this profile to match your machine. Do not use encoder feedback right away Once motor start working with step and direction, then calculate feedback gain for each encoder, and then enable encoder feedback.
For more information refer: Closed loop PID configuration
For Closed loop Product listing visit HiCON Integra
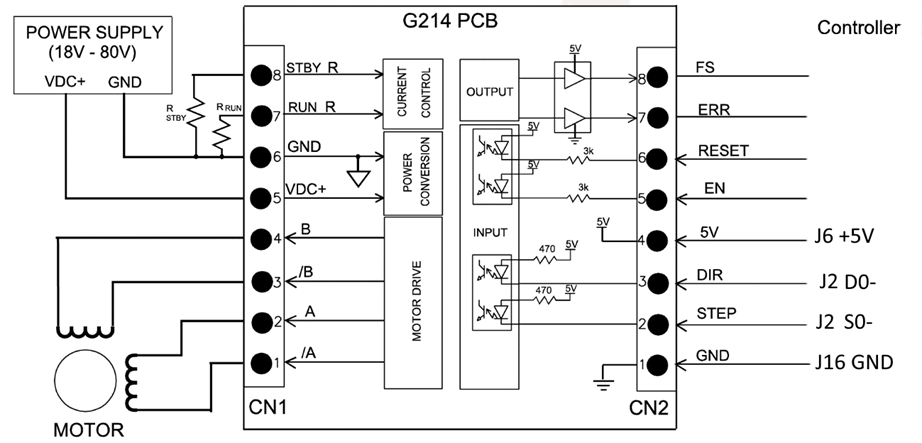
Gecko G214
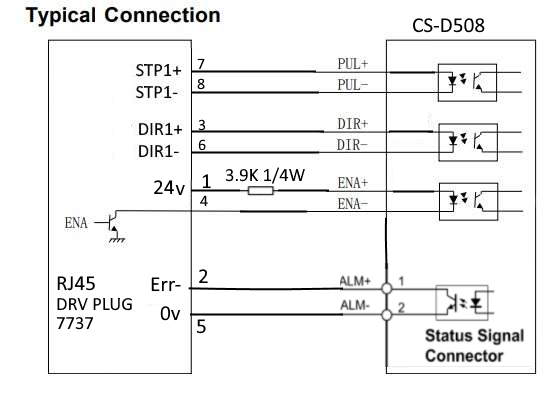
CS-D508
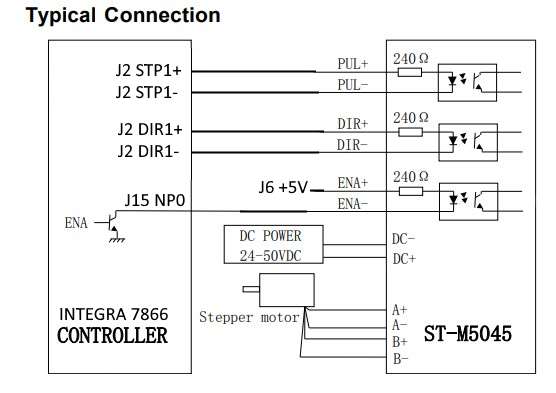
ST-M5045
ClearPath
![]()
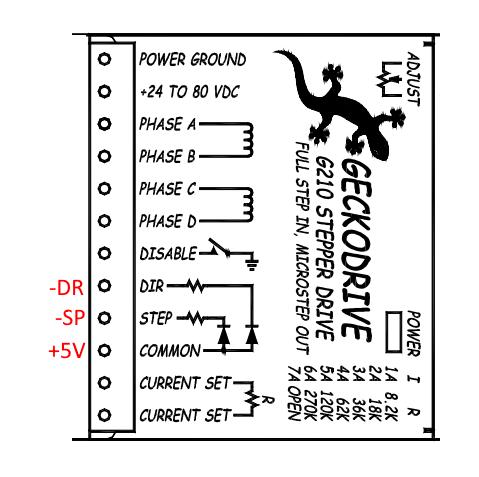
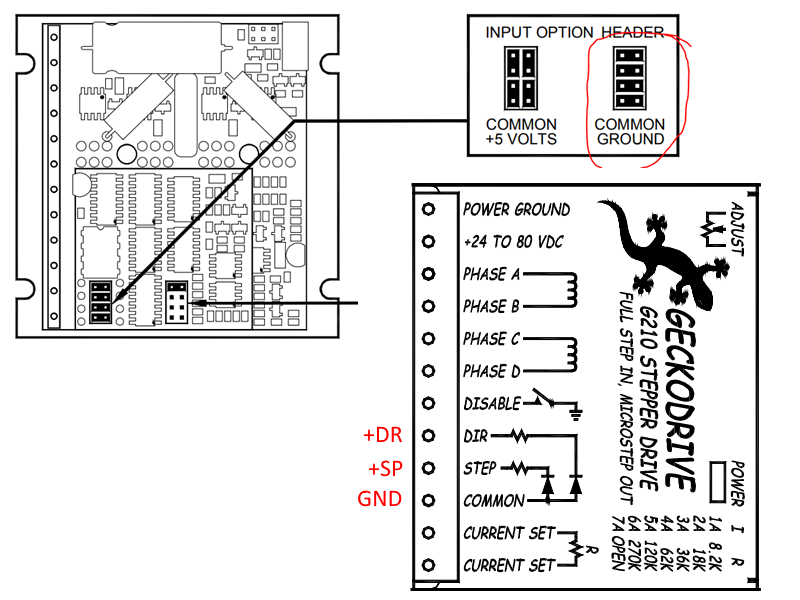
Gecko210
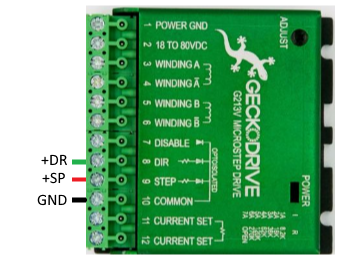
Gecko213V
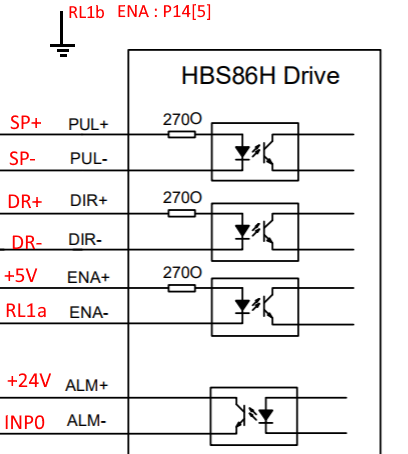
HBS86H
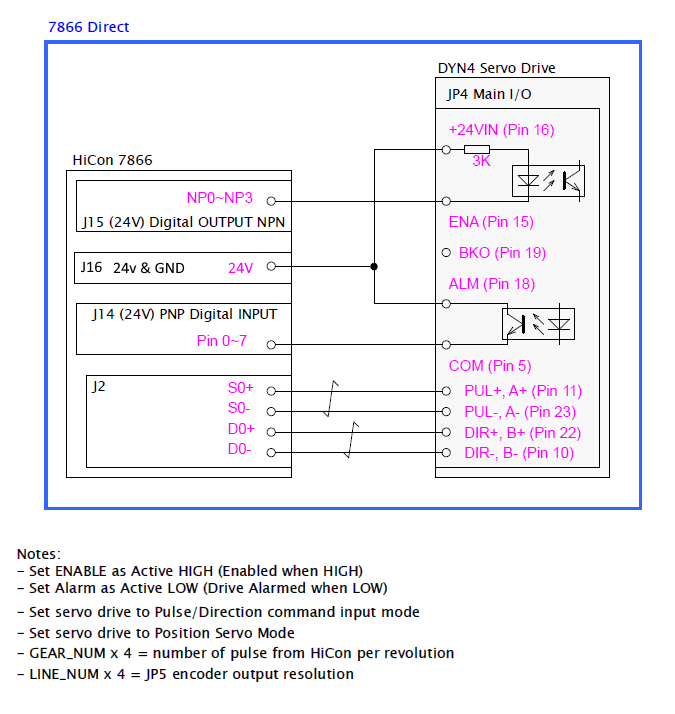
DMM-Dyn4
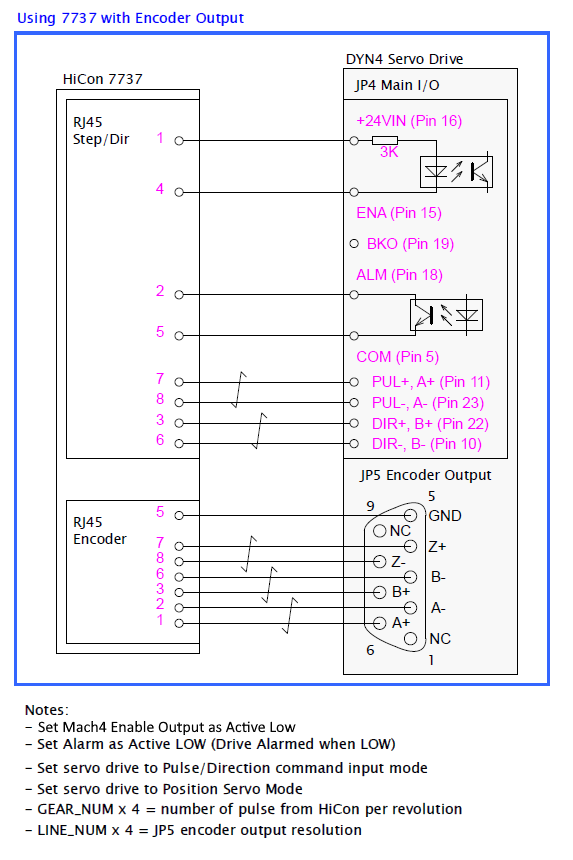
DMM-Dyn4 With 7737
DMM-Dyn2-
Integra with ±10V Analog Spindle Drive
Integra/DSPMC/EC01/ECS1 Single Ended Encoder Connection
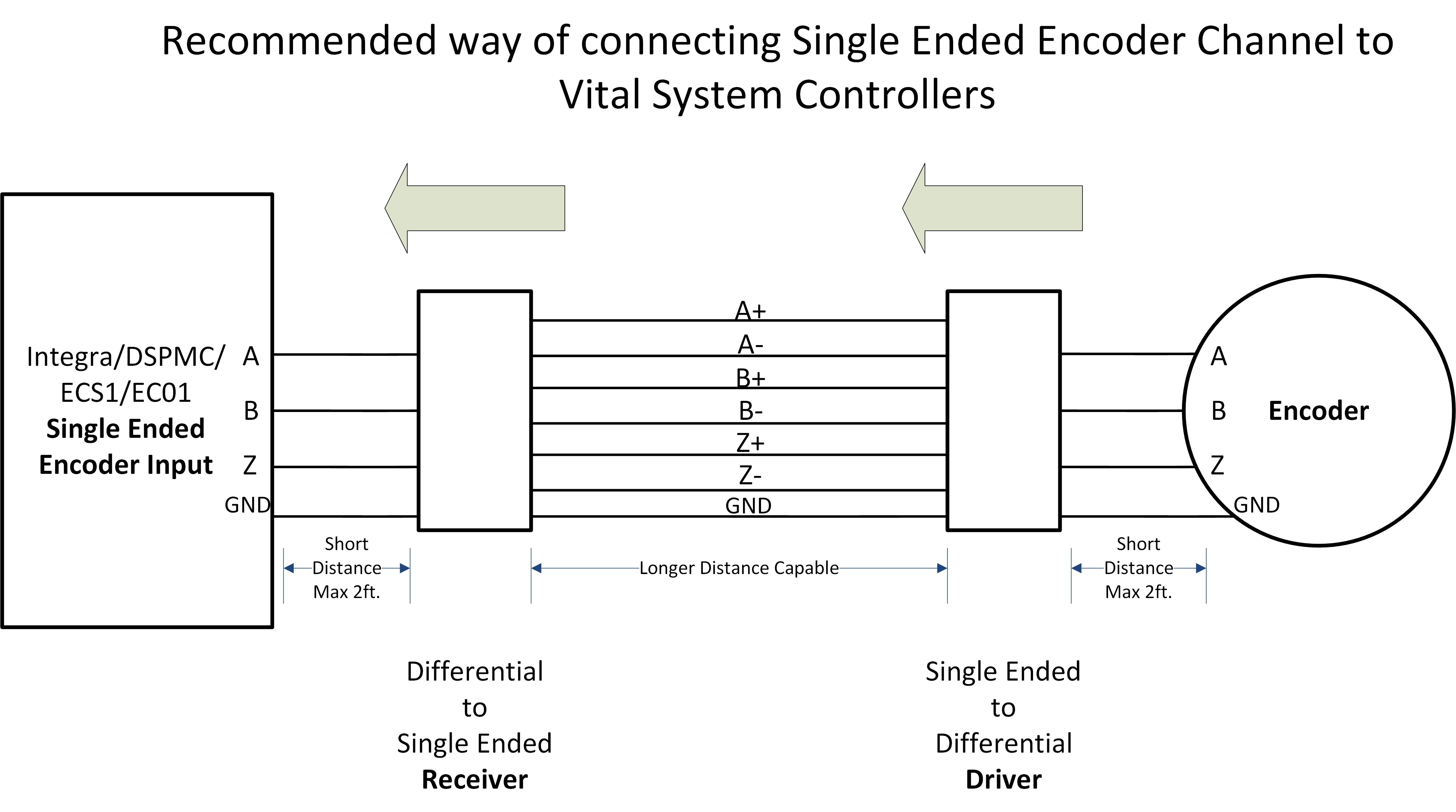
Wiring Diagram
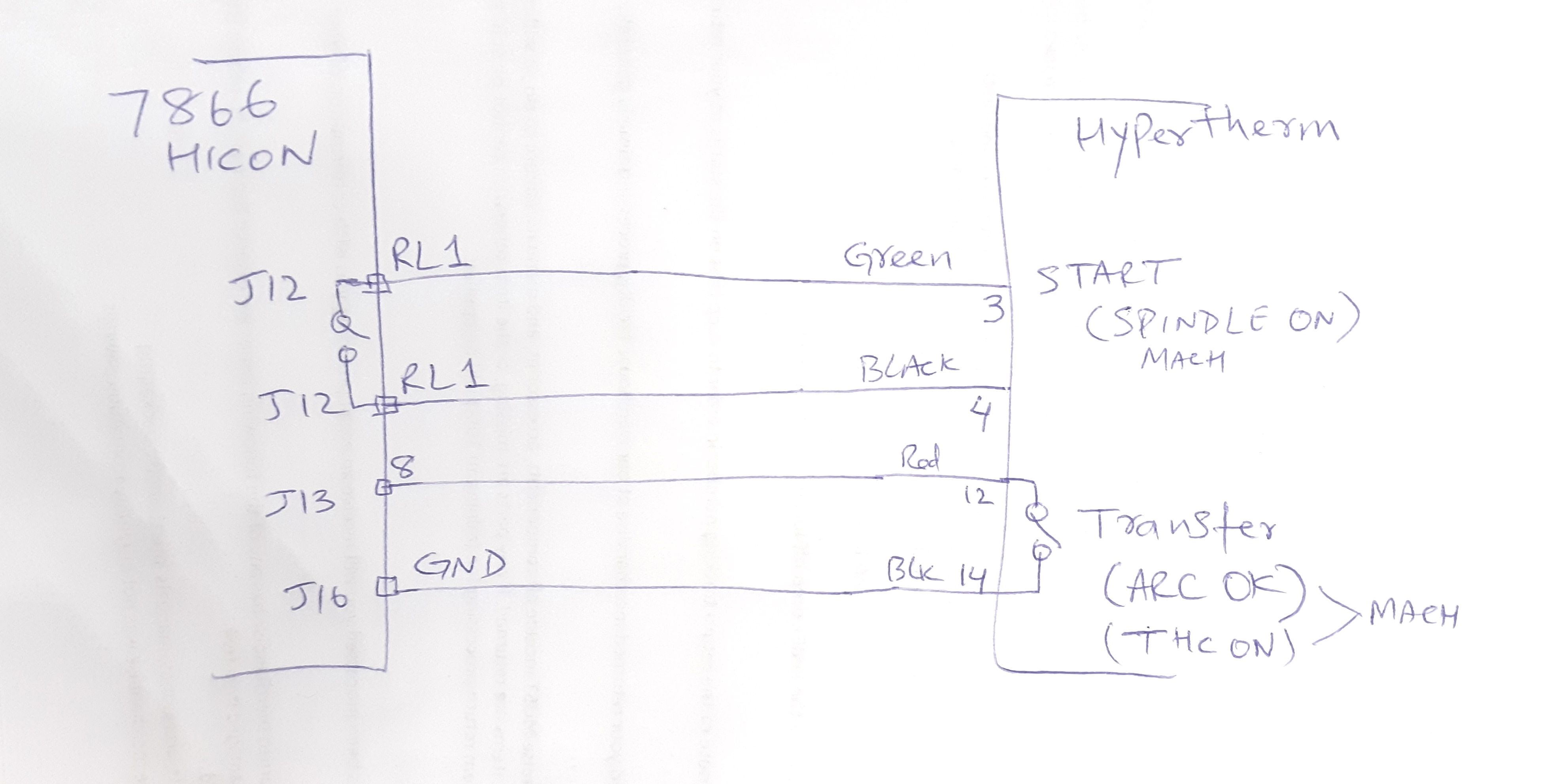
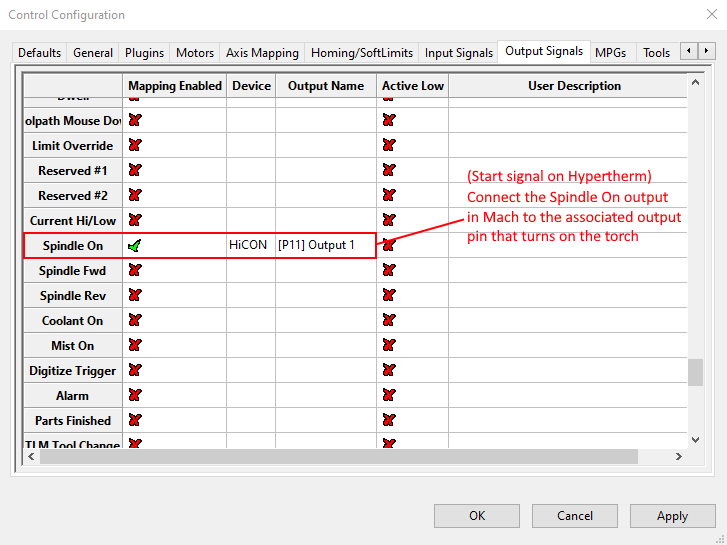
The Start/TorchON wires from the plasma must be connected to a relay on the HiCON controller.
For the Transfer/ArcOK wires, one must be connected to an NPN/PNP input on the HiCON controller while the other must be connected to either GND/24v respectively.
This is demonstrated in the below wiring diagram:
ARCPRO: Arc-OK Signal
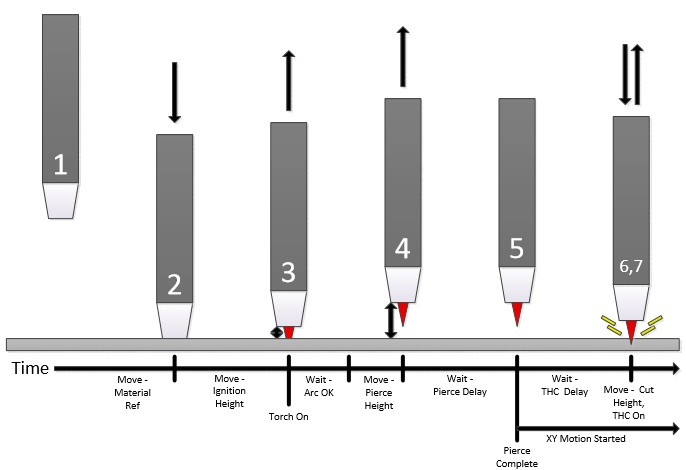
The 'Torch Height Control' feature of the HiCON motion controller waits for the 'Arc OK' signal after the torch head lifts to the ignition height and turns ON. If the 'Arc OK' signal is not detected, the THC sequence will be aborted by the controller. The following image shows the steps in a 'Plasma-cut' sequence.
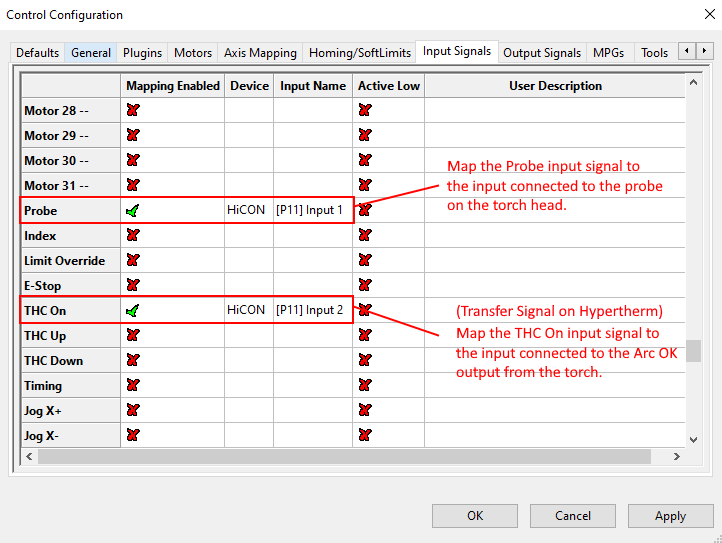
It's important to note that the 'Arc OK' signal must be mapped to 'THC ON' Input signal in Mach4. The following images show the necessary mappings in Mach4.
It's highly recommended that one follows the ArcPro Plasma Guide document well before trying the 'Torch Height Control' feature.
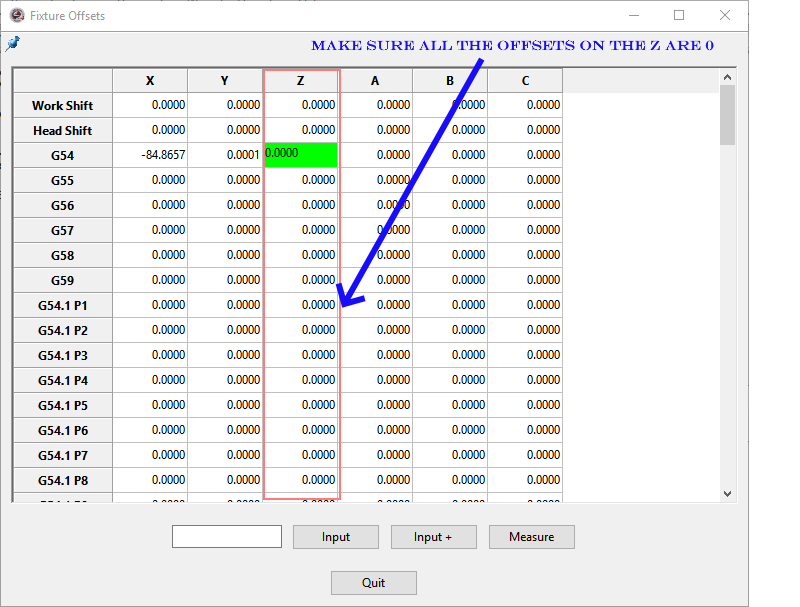
ARCPRO-Z Offset
On the Z-Axis, make sure there is no offset (G54, G55, G56, ...). The other axis X or Y etc can still have offsets defined. The 'ArcPro v1' uses the machine coordinates on Z-axis, hence choosing an offset on Z-axis may swap the probe direction and create a problem.
How to do a fresh install of HiCON Plugins Files
Copy any mach4 license files in the licese folder to a safe location.
Please uninstall the old mach4 version completely.
Make sure C:\Mach4Hobby is completely removed or any other mach4 folder in the C:\ directory.
Now download fresh mach4 version from their website: Mach4 Download Page
download the latest plugin: Integra Plugins Download
extract and copy only the .m4pw and .sig files to mach4 plugins folder.
Download the sample mach4 profile for integra from vital system: Mach4_Integra_Mill.m4prof
Launch Mach4 Loader icon on your desktop and select import profile and go the above downloaded sample profile location and select it.
You will see Integra in the profile selection and launch it.
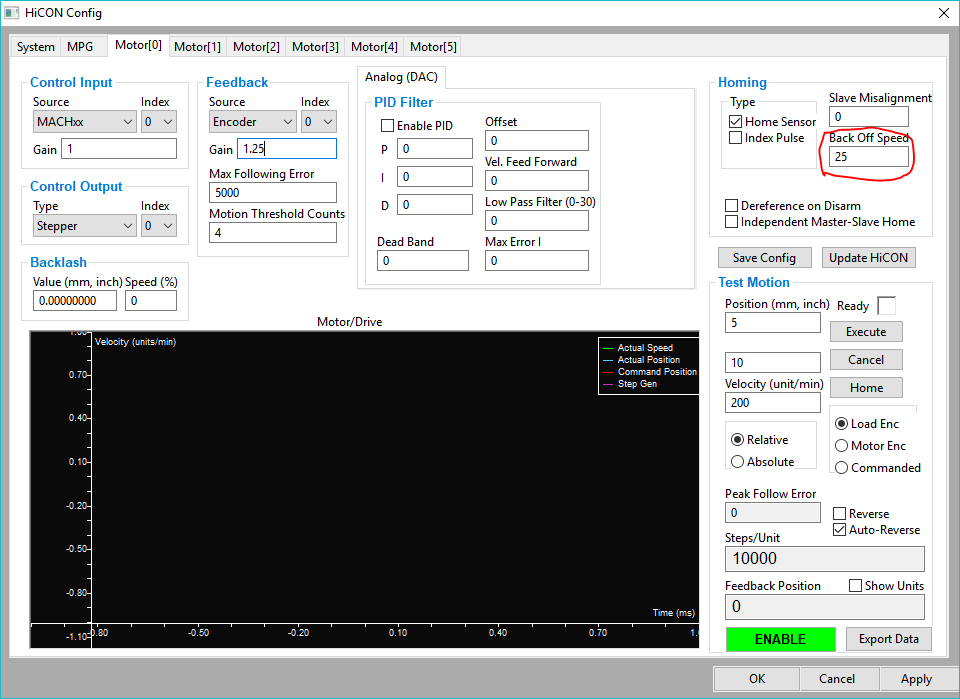
When ref-all pressed, motor stops after some motion
The BackOff speed setting on HiCON plugin config window must be given a good value.
If it's zero or too low, the motor won't move away from the sensor.
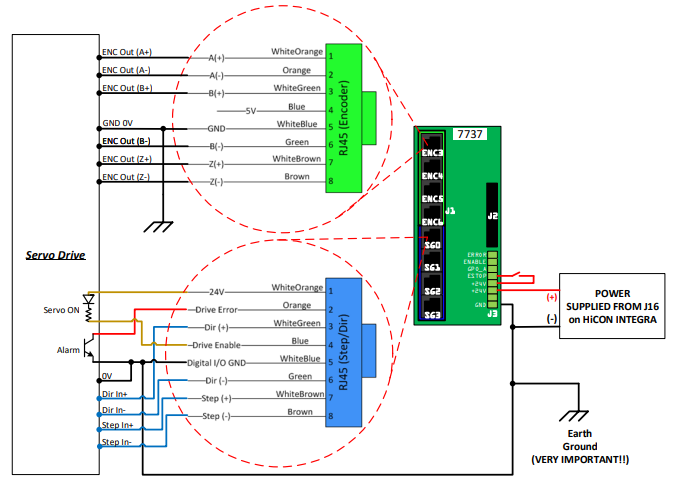
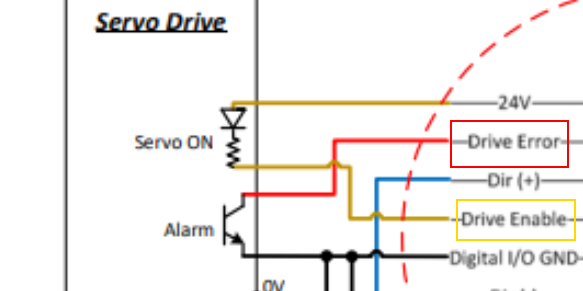
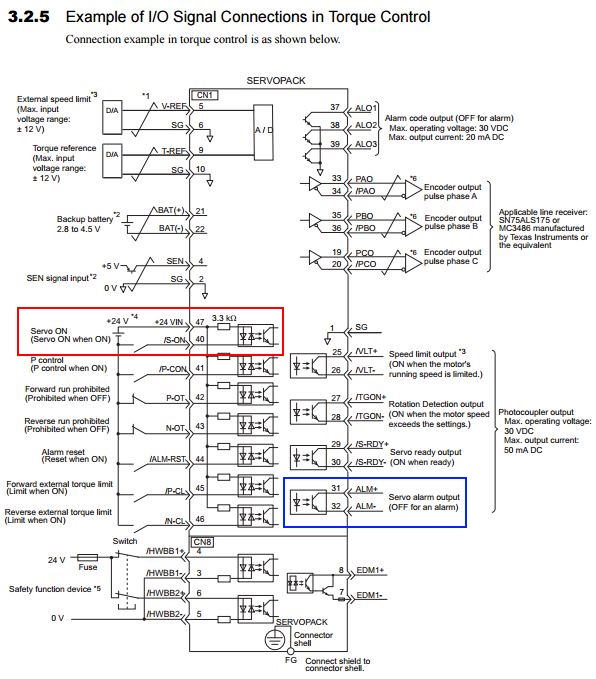
Connecting 7737 to a Servo Drive e.g. Yaskawa
The 7737 wiring with a motor drive is discussed in the The terminals "Servo ON" on Servo Drive connects with '+24V' and 'Drive Enable' from 7737. Some Drives only use 5volts, so please check before you hookup 24V.
The terminals "Alarm" on Motor Drive connects 'Drive Error' and 'Digital IO GND' from 7737.
The Enable and Alarm terminals that you can connect to 7737 for instance on "Yaskawa" Servo Drive you may find similar setup on your specific drive.
7737 Enable on VSI Device Manager
The features of 7737 like ESTOP and Motor Step/Dir signals will not work unless the port (J7/J8) is enabled using the VSI Device Manager and downloaded on to the Integra board.
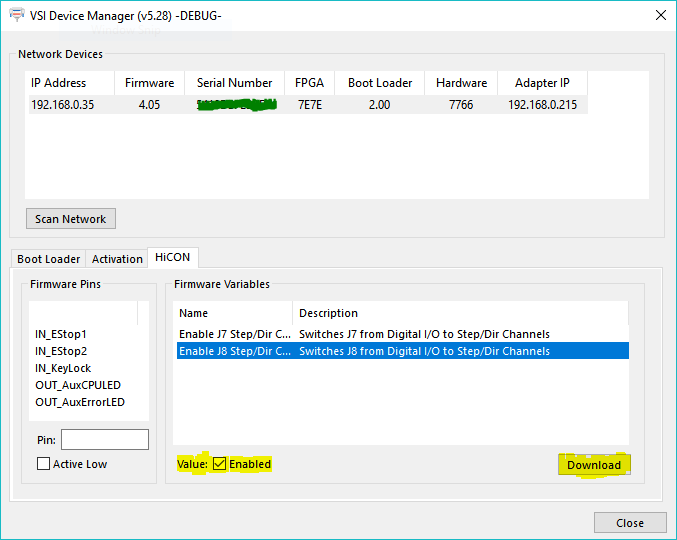
On your VSI Device Manager, select your HiCON motion controller and select "HiCON" tab
Check "Value Enabled" and hit on "Download" button.
This ensures that 7737 that you are going to use with J7/J8 is going to switch from I/O to Step/Dir Channels.
For quick questions, you are welcome to email or call us even if you have used up the free 1/2 hour included support.
| Part # | Description | Price | Add to Order |
|---|---|---|---|
Support Packages |
|||
| TSH | Hourly Tech Support | $250 | Add to order |